
Transplante do Módulo Wi-Fi Tuya do Robô Aspirador KaBuM! Smart 500 para Módulo Tasmota
Em desenvolvimento ativo.
There is no cloud, it’s just someone else’s computer.
Nesse repositório você encontra tudo o que precisa saber para retirar o módulo Wi-Fi original do seu robô aspirador Tuya e introduzir um módulo Wi-Fi baseado em ESP para ser utilizado com Tasmota e controlá-lo no Home Assistant via MQTT fora da núvem.
Parto do princípio que você já esteja familiarizado com módulos ESP, Tasmota, MQTT, Home Assistant, YAML. Caso não os conheça, recomendo que continue utilizando o aplicativo Tuya.
Os passos aqui descritos funcionam para os seguintes aspiradores:
- KaBuM! Smart 500 (KBSF000)
- Liectroux C30B
Passo a passo do Transplante do Módulo Wi-Fi
Itens necessários
- Módulo ESP, preferencialmente o Wemos D1 Mini, ou um NodeMCU (com Tasmota já instalado e configurado).
- Cabinhos Dupont (jumpers).
- Fita dupla face ou cola quente.
Desmontando o Robô
- Vire-o de cabeça para baixo.


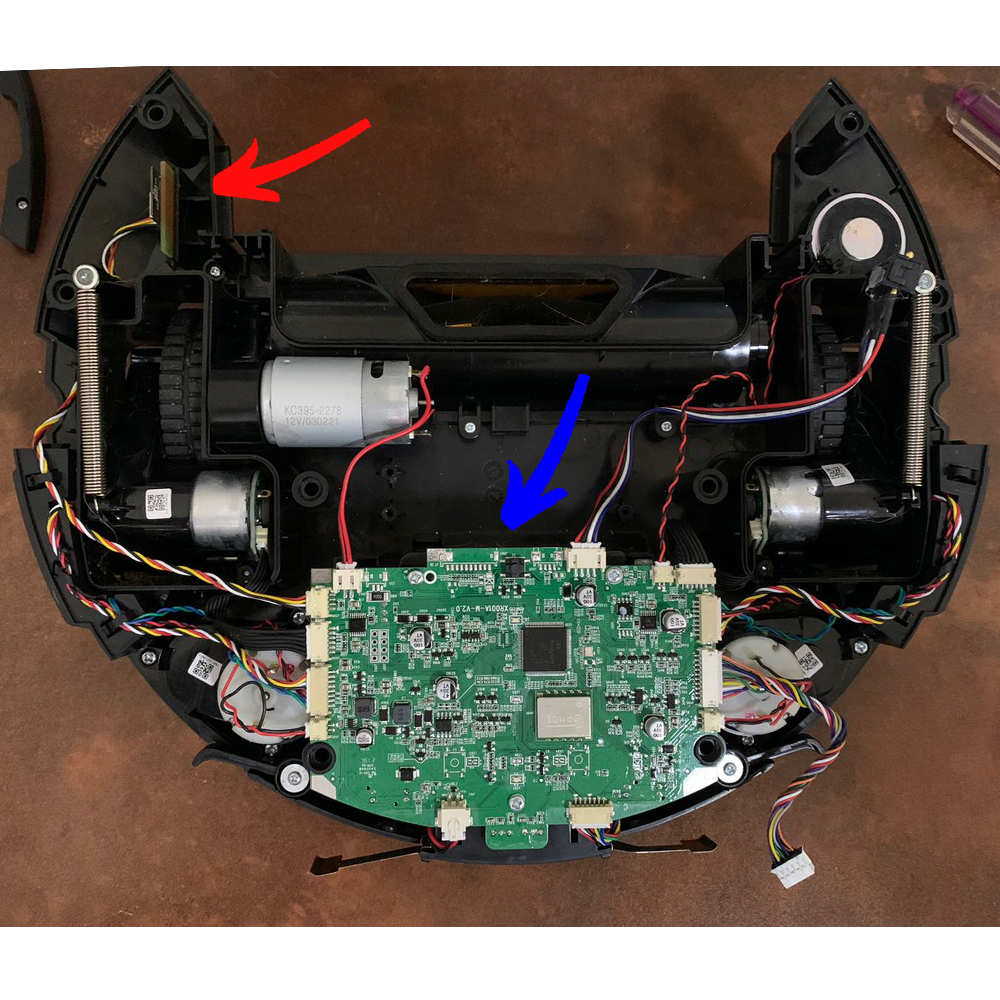
- Retire o compartimento de poeira e as escovas. Retire os parafusos marcados de verde na foto. Retire também as abas frontais.

- Agora vamos abrir o robô. Vá com calma pois ainda existe um cabo ligando as duas partes.

- Retirando esse conector, você pode abrir o robô totalmente.

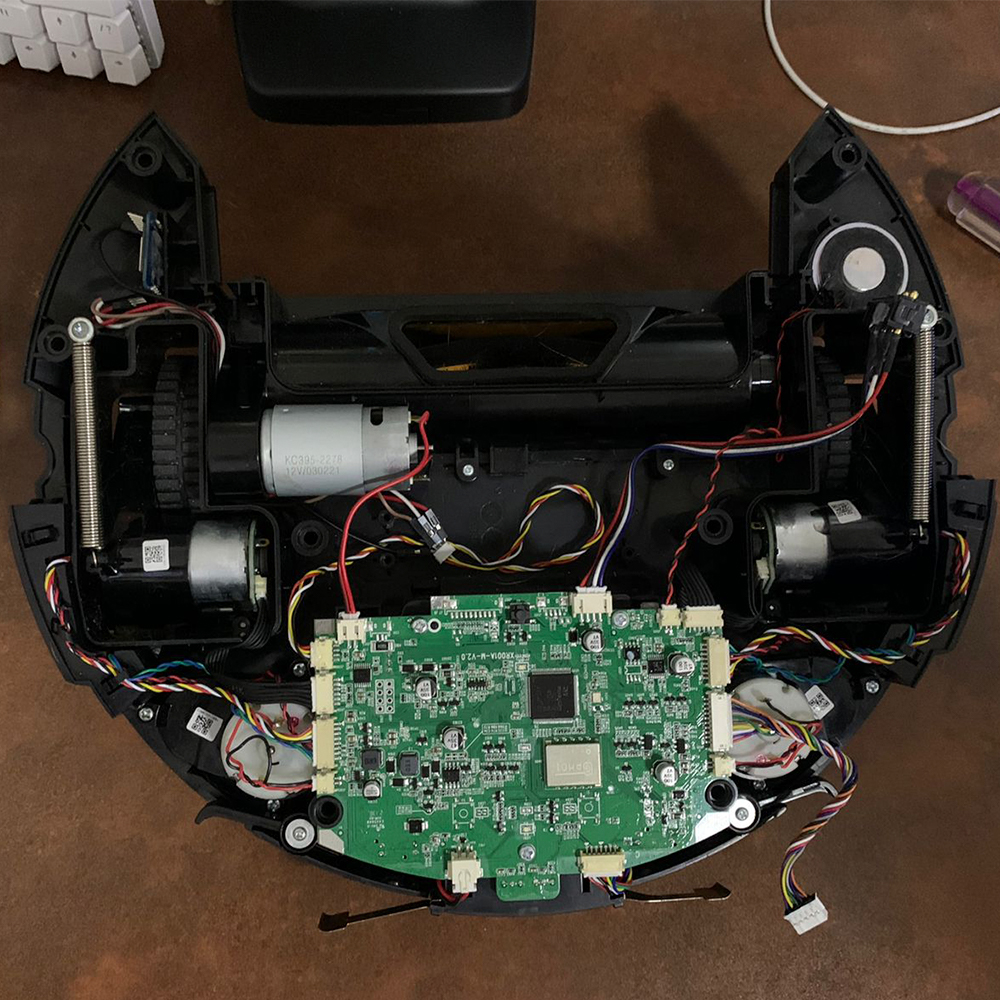
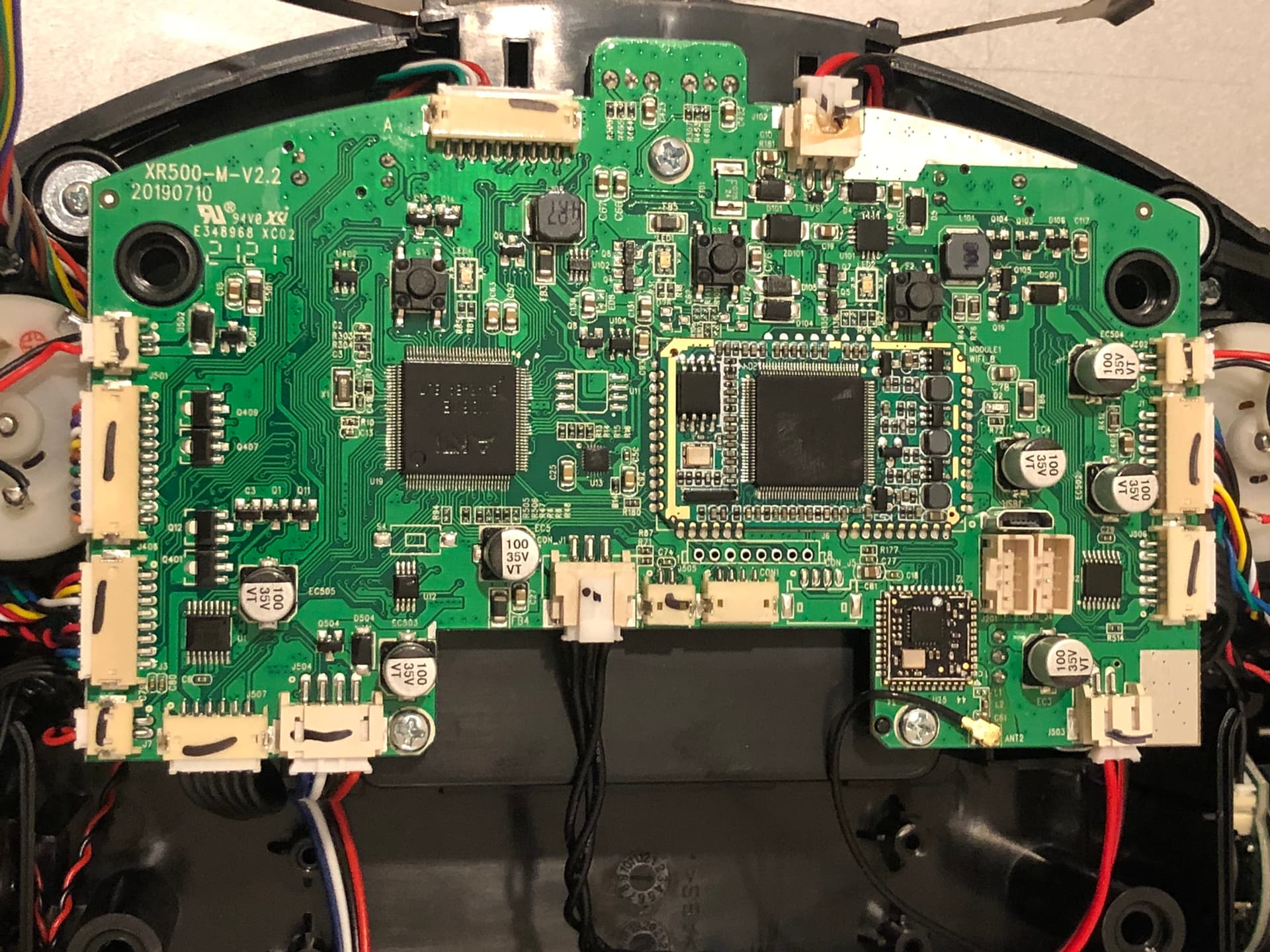
- Com o robô aberto, você pode ver que ele possui duas placas. A maior, marcado de azul, é a placa principal, onde o robô faz todo o processamento e controla todos os motores. Não tocaremos nela. A placa menor, marcada de vermelha, é o módulo Wi-Fi Tuya que vamos retirar. Ela controla apenas a comunicação do robô com a internet, por isso não há perigo de estragar o seu robô, ele funciona até mesmo sem essa placa, mas apenas no controle remoto.
- Você pode desconectar e retirar o módulo Tuya.

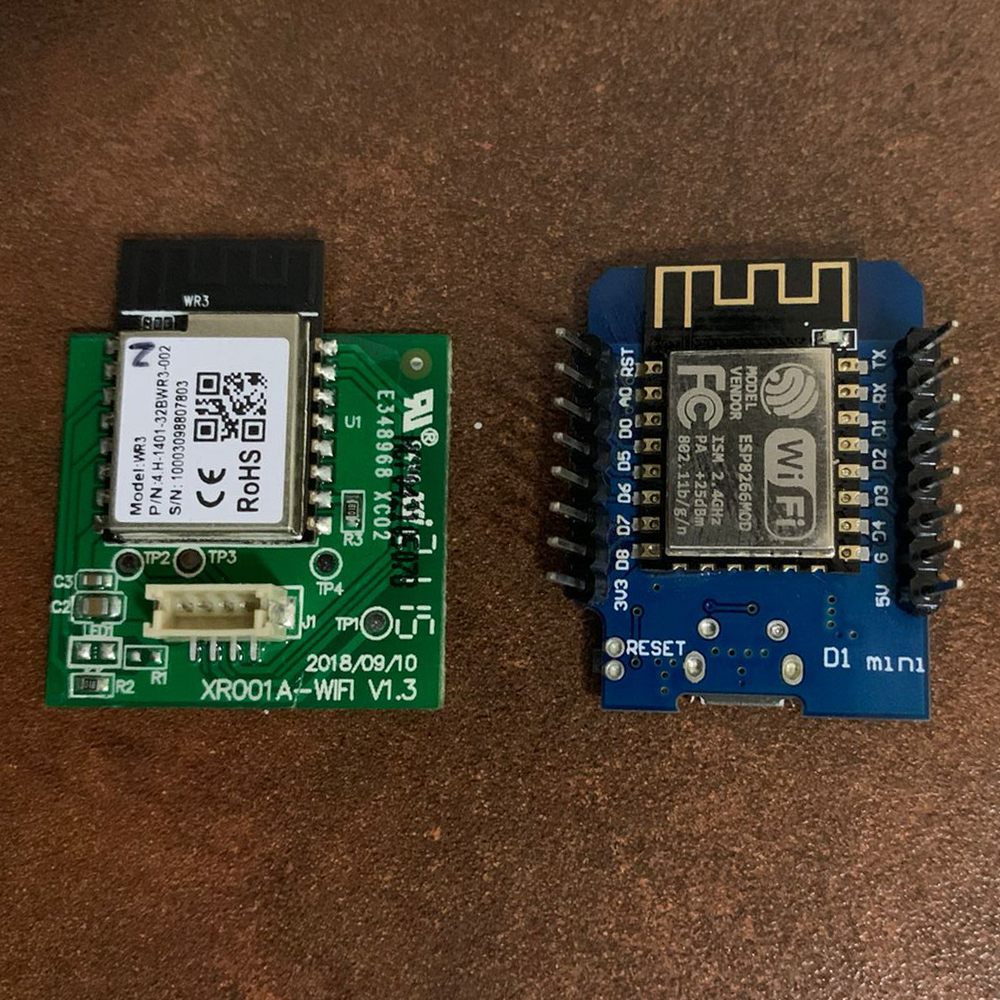
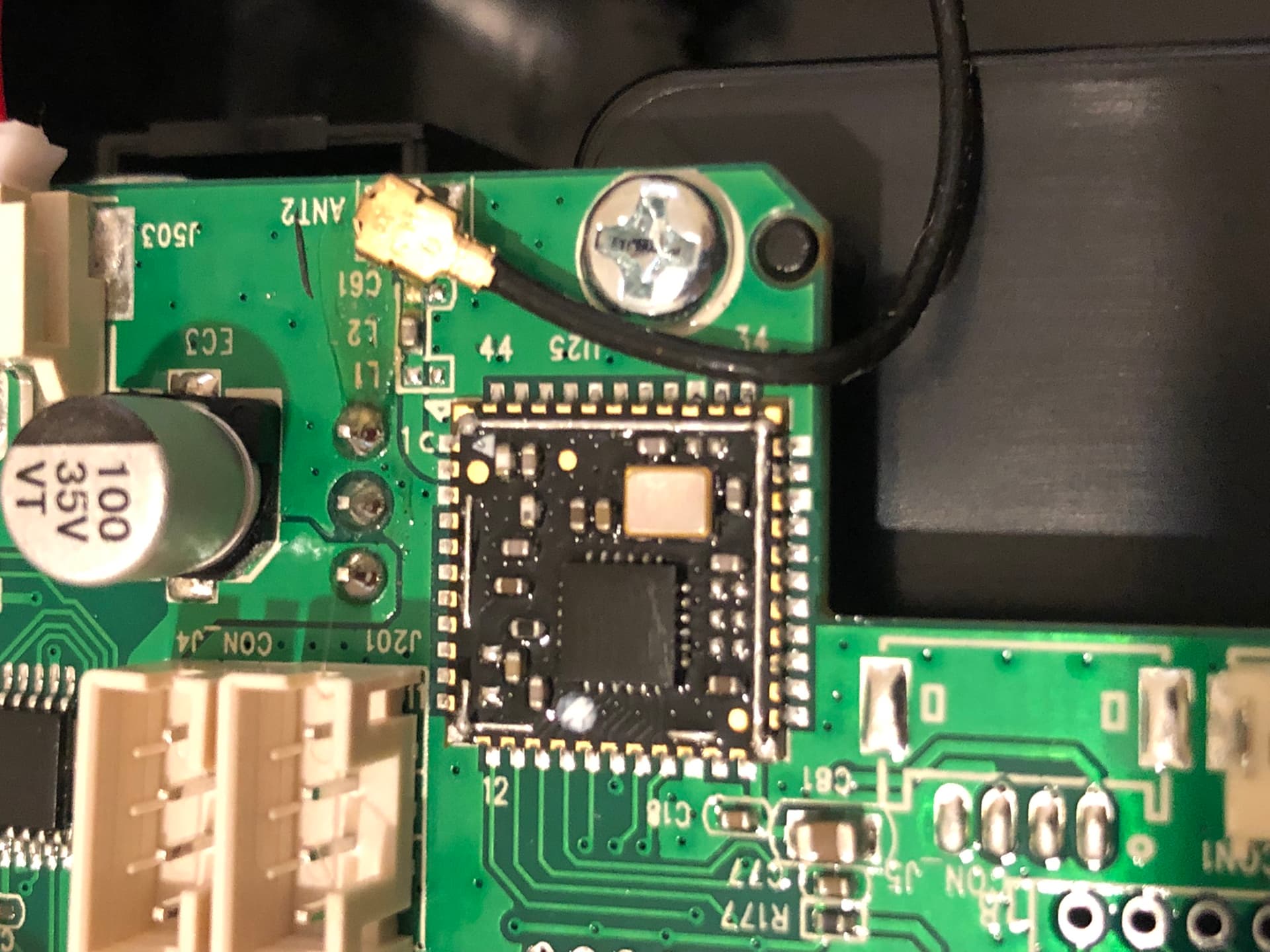
- O módulo Tuya WR3 mais de perto. Infelizmente esse modelo não é compatível com os firmwares opensource, como Tasmota e ESPHome, por isso a necessidade da troca. Recomendo que o guarde, pois no futuro, se desejar, você pode desfazer todos os passos e ter o robô funcionando no aplicativo Tuya novamente.

Instalando o novo módulo Wi-Fi
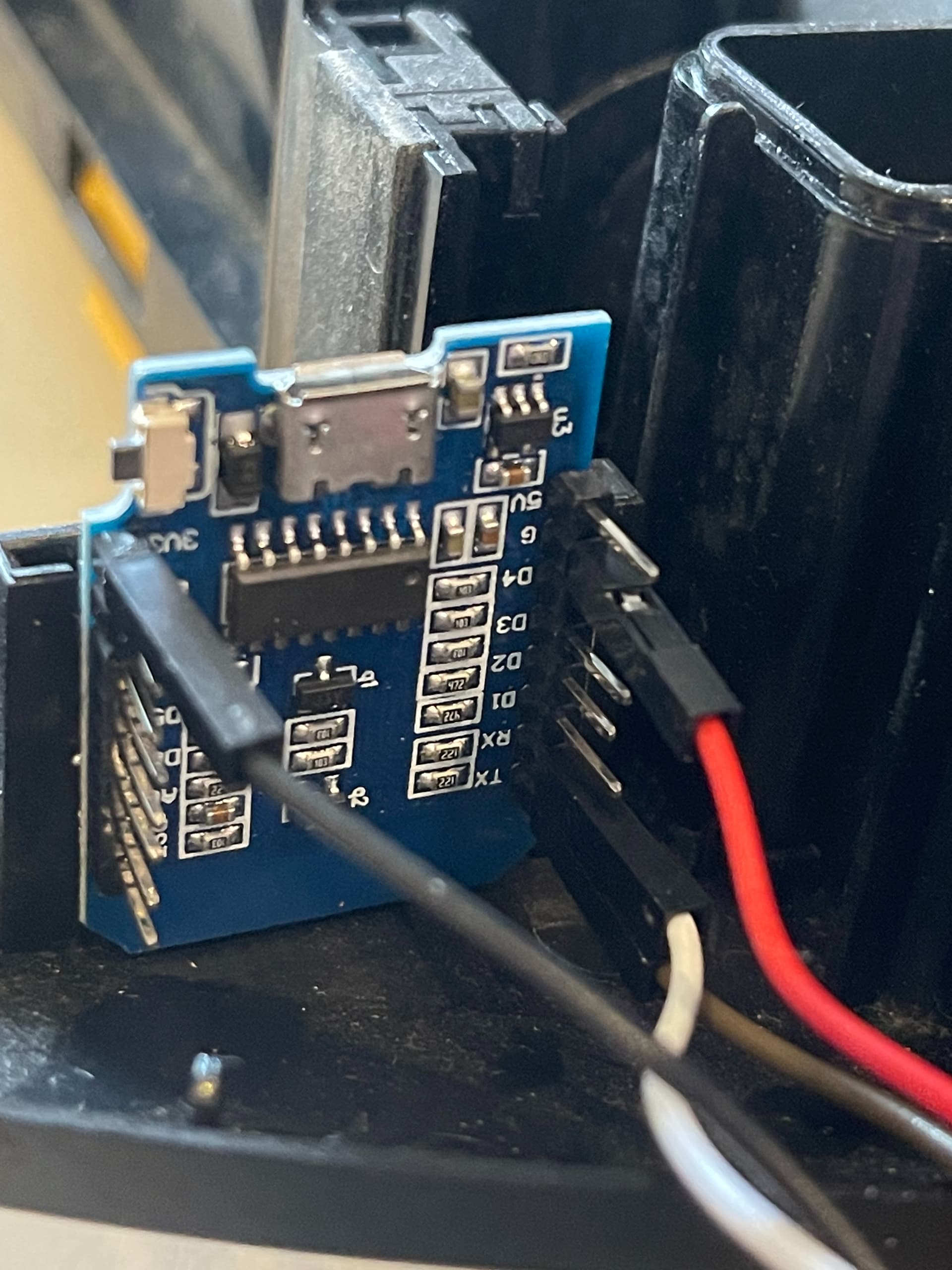
- O módulo Tuya WR3 e um D1 mini com um ESP8266 lado a lado. Percebe a similaridade? Se você possuir uma estação de solda, dá pra fazer o transplante do chip para a placa original do Tuya, provavelmente esse seria o modo de instalação mais “clean”.
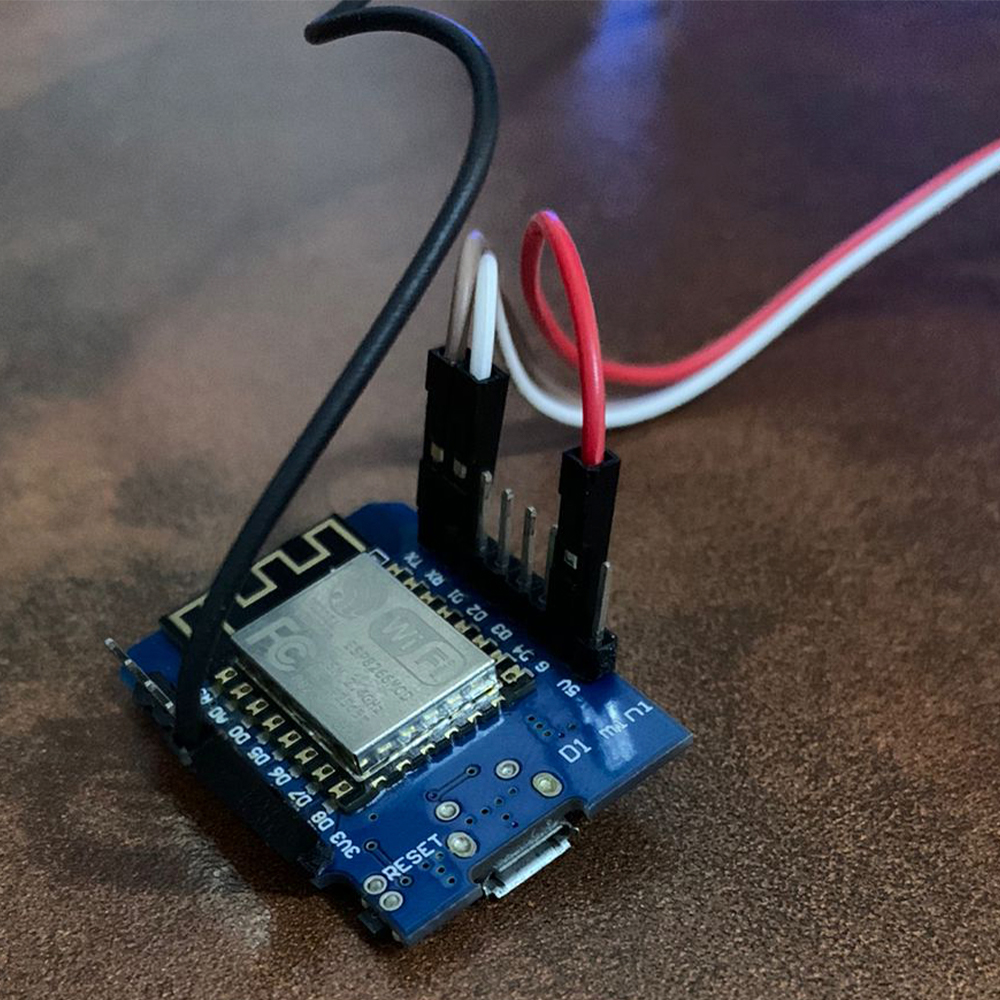
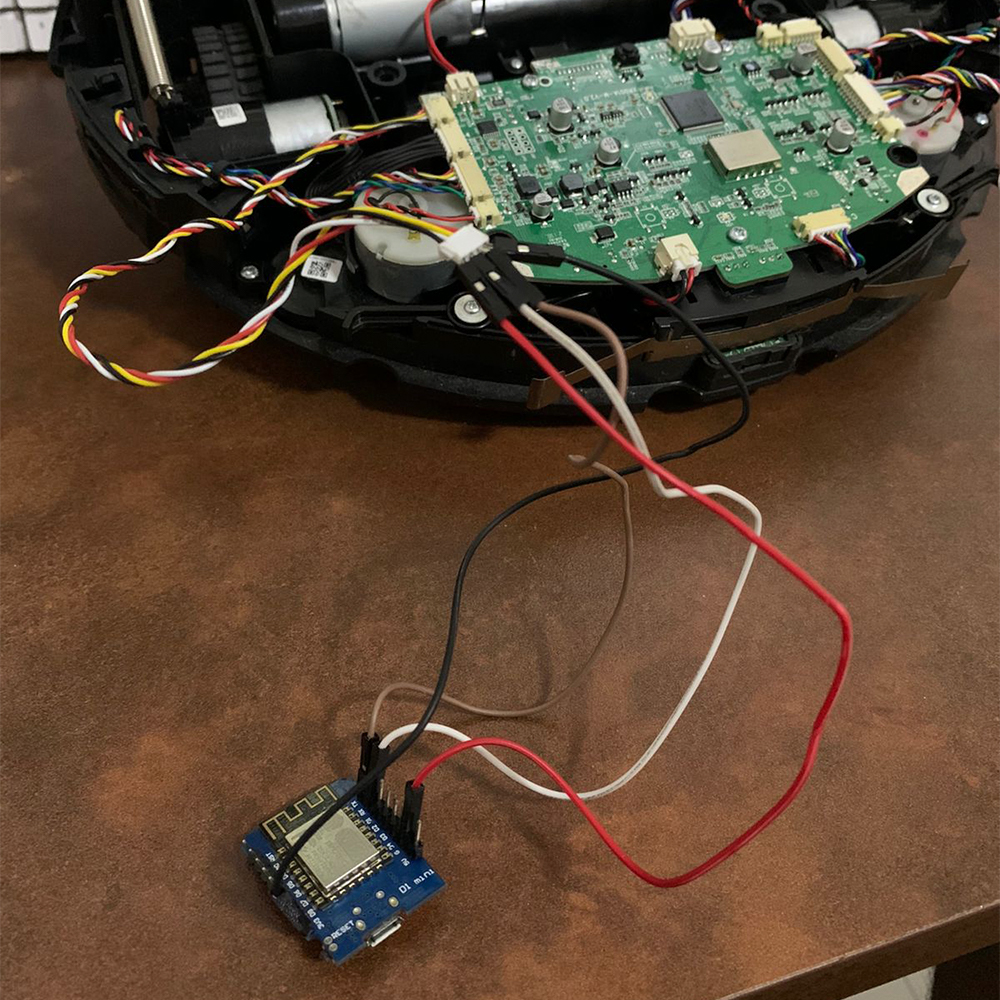
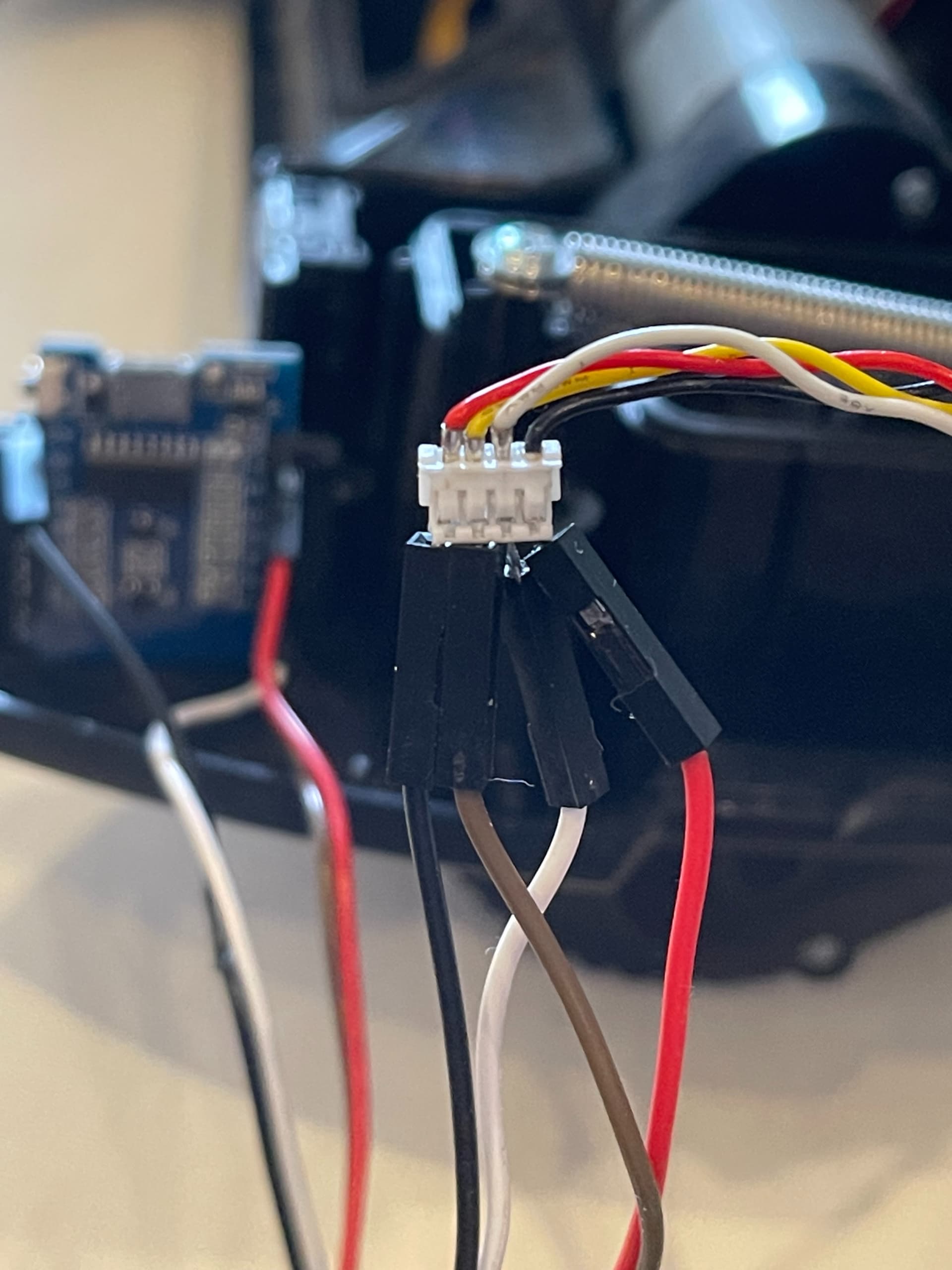
- O módulo Wi-Fi já deve estar com o Tasmota instalado e configurado com suas informações de Wi-Fi antes de realizar a troca. Usaremos cabinhos jumpers com uma ponta macho e a outra fêmea. Na foto o jumper preto está ligado no (3V3), o jumper vermelho no ground (G), o jumper branco no (RX) e o jumper marrom no (TX).
- As pontas macho devem ser conectadas dessa forma, no conector onde antes ficava instalado o módulo Wi-Fi Tuya.
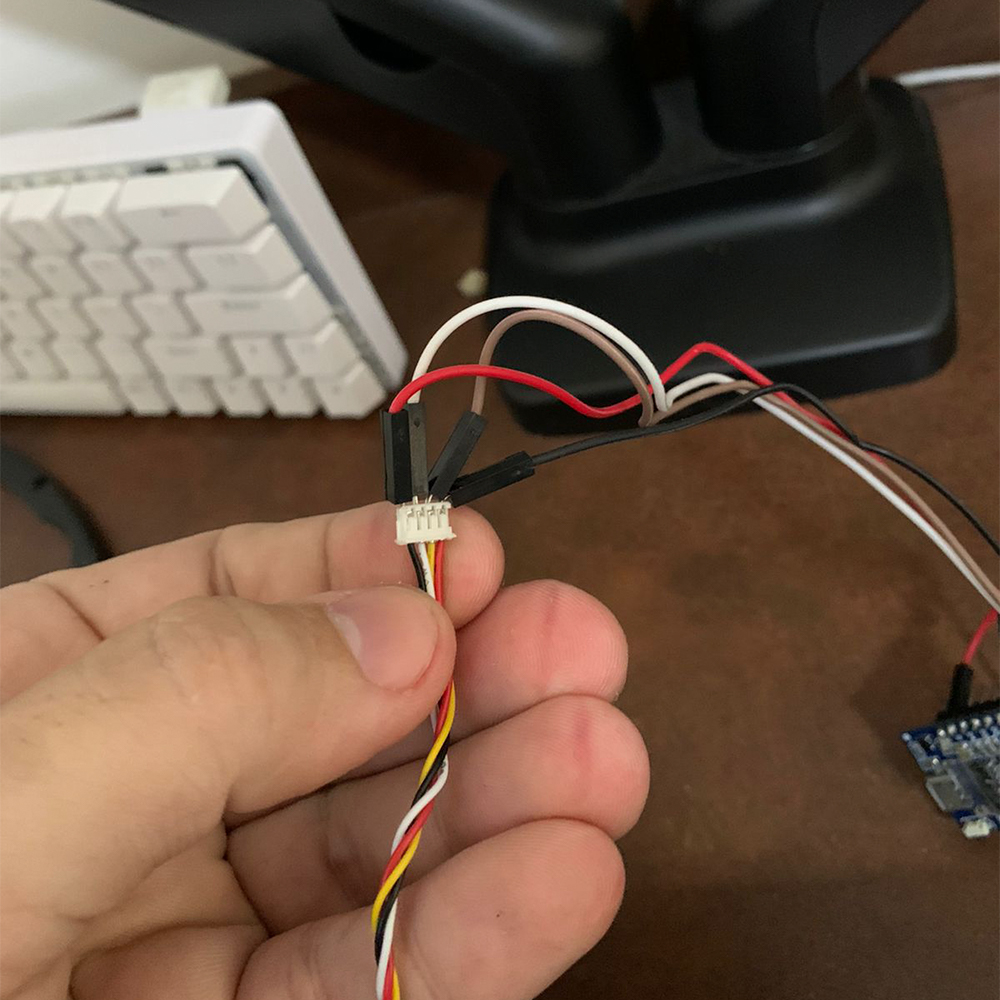
- Ligação completa.
- Coloque o módulo Wi-Fi novo no mesmo lugar. Recomendo utilizar uma fita dupla-face ou cola quente para fixar bem o módulo.
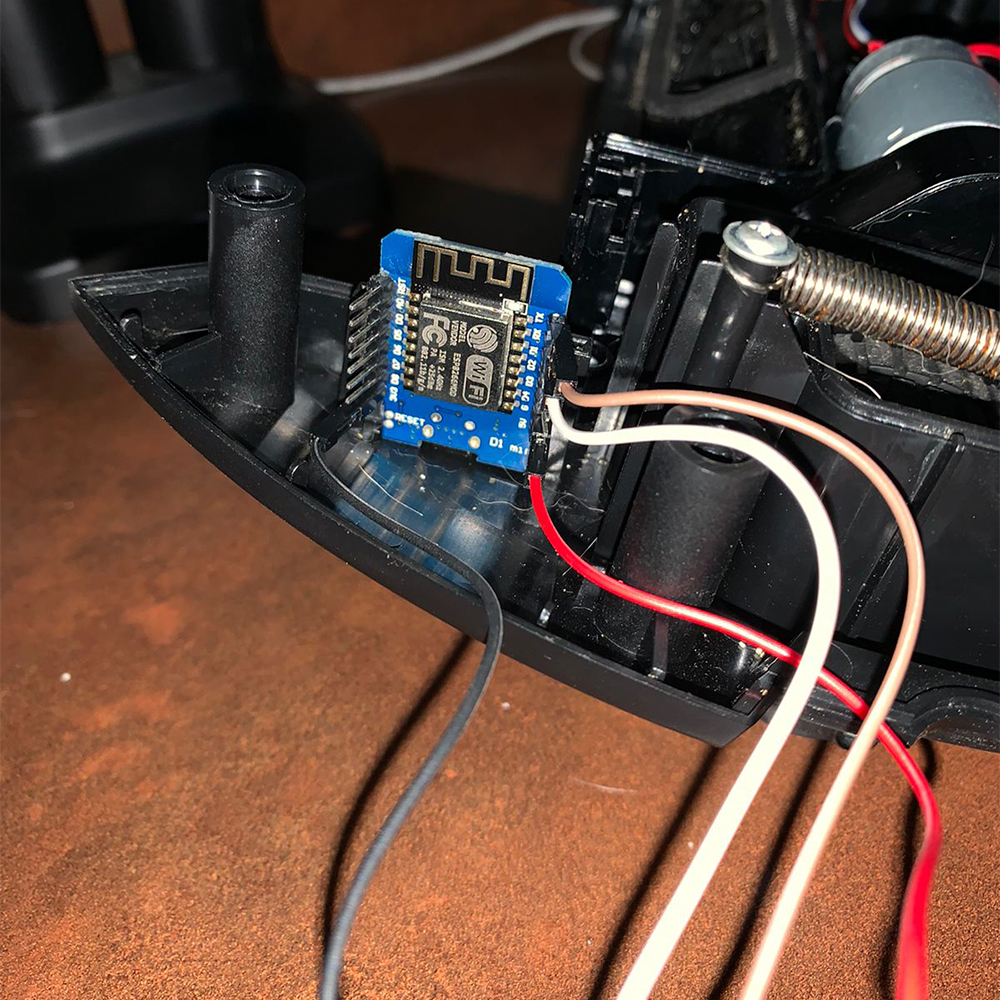
- Organize os cabos de modo que eles não sejam esmagados na hora de fechar o robô. Como o cabinho ficou mais longo, optei por usar outra rota, passando por debaixo do motor. Certifique-se que o conector do módulo Wi-Fi na placa principal está bem conectado, tive alguns problemas de mau-contato e preferi usar cola quente para fixá-lo melhor.
- Agora você pode fechar o robô.
"Se você conseguiu abrir, você também consegue fechar", como dizia a minha mãe quando eu abria alguma coisa que não devia.
Tasmota
Acesse a interface web Tasmota do robô pelo endereço IP do mesmo.
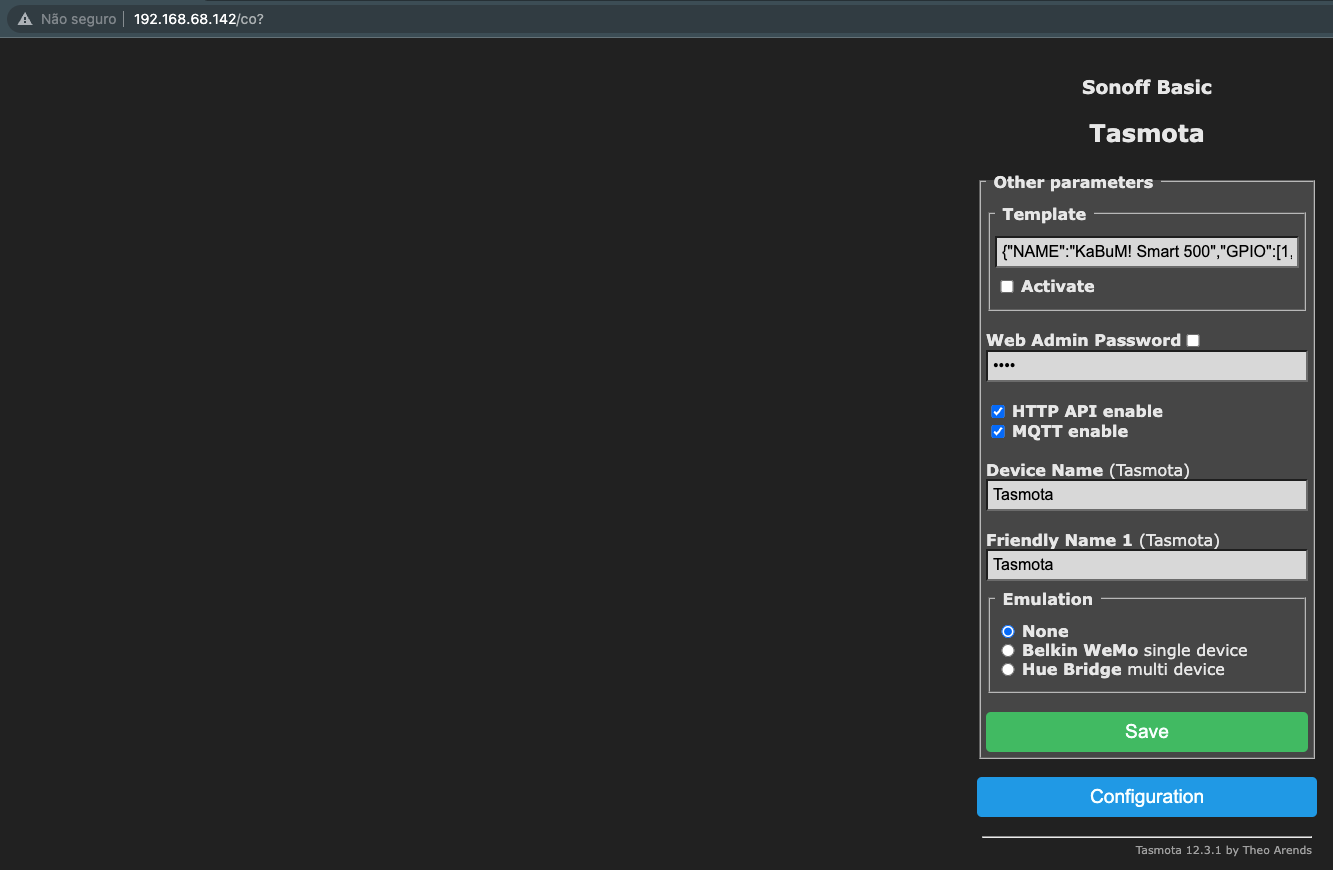
- Template
Main Menu → Configuration → Configure Other → Other parameters → Template:
Utilize o seguinte template:
{"NAME":"KaBuM! Smart 500","GPIO":[1,1,1,1,1,1,0,0,1,1,1,1,1,0],"FLAG":0,"BASE":54}
Clique em Activate e depois em Save.
- Console
Main Menu → Console:
Utilize o seguinte comando:
Backlog SetOption66 1; Topic kabum500; Rule1 1; Rule1 on TuyaReceived#Cmnd=43 do SerialSend5 55aa002b0001042f endon
SetOption66 1: Ativa o envio das mensagens via MQTT.Topic kabum500: Nomeia o MQTT Topic parakabum500(necessário para a integração com o Home Assistant mais adiante).Rule1...: O TuyaMCU (chip Tuya que ainda se encontra na placa principal) exige informações do status do Wi-Fi a cada 90s (TuyaReceived#Cmnd=43). Se não respondermos com um “OK” (SerialSend5 55aa002b0001042f) o TuyaMCU reseta o nosso módulo Wi-Fi.
Adicionando ao Home Assistant
-
Copie os arquivos kabum500.yaml ao diretório
config/da sua instalação do Home Assistant, e a imagem do aspirador ao diretórioconfig/www/. -
Adicionar ao configuration.yaml
homeassistant:
packages:
kabum500: !include kabum500.yaml
- Card
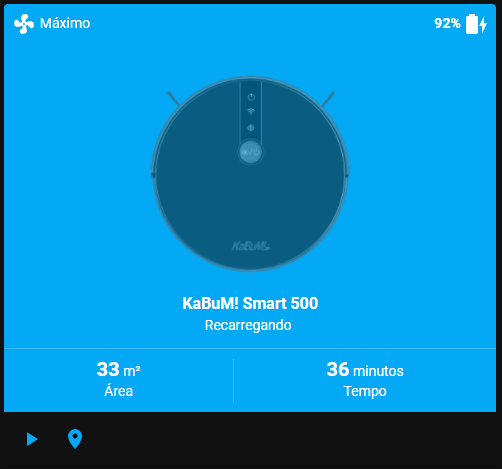
Instale o Lovelace Vacuum Card no Home Assistant via HACS ou manualmente.
Utilize a configuração contida no arquivo lovelace_vacuum_card.yaml para deixar seu card como no exemplo abaixo (ainda estou trabalhando nele):
IMPORTANTE: Não me responsabilizo por eventuais danos ao seu robô aspirador caso venha a seguir esse tutorial.
Cada um com seus problemas. - Legião da Má Vontade (Hermes e Renato)
To Do List
- Funções básicas.
- Implementar erros.
- Botões para movimento manual.
- Mapa.
Inspiração
Este projeto foi inspirado por:

{kind=link}